
空気圧ゴム人工筋を用いた柔軟なアクチュエータの開発
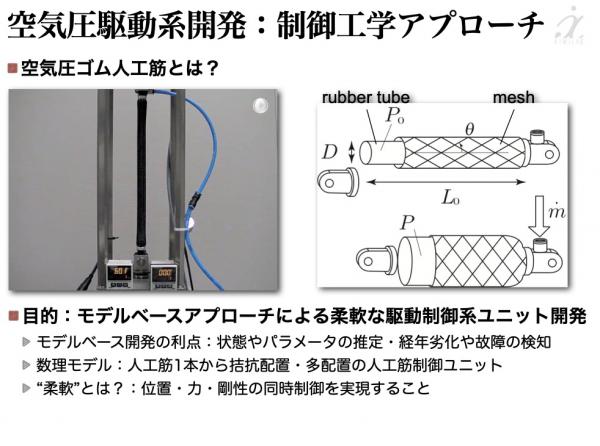
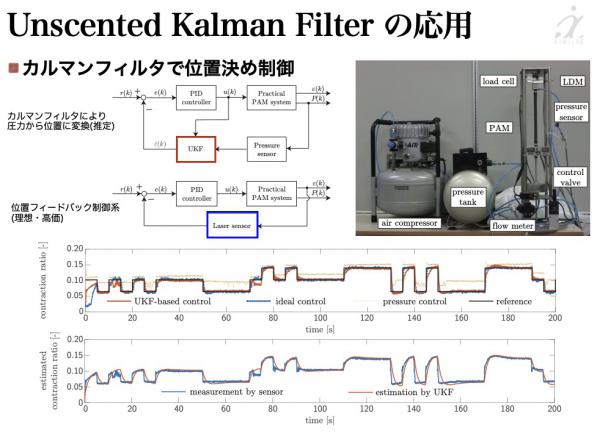
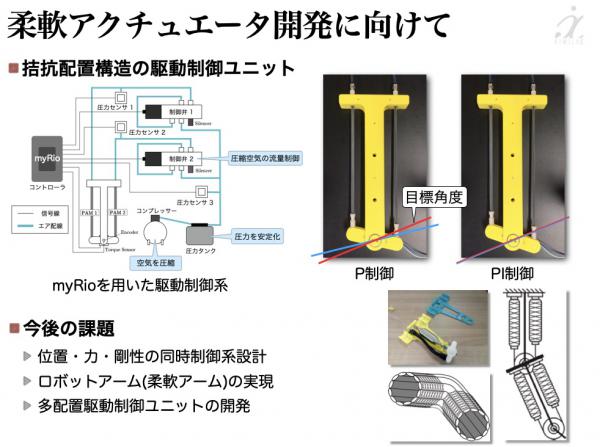
人に優しく,かつ,軽量・柔軟なアクチュエータを実現するために,空気圧ゴム人工筋を用いた駆動制御装置を開発しています.空気圧ゴム人工筋を用いた従来のアクチュエータは,人工筋内部の圧力を比較的に高い圧力状態にした制御装置が多く見られますが,柔軟性に欠けます.一方,本研究では,低圧域(2気圧程度)から高圧域(6気圧程度)までをカバーする動的モデルを同定し,柔軟性を調整可能な角度/トルク制御を実現する駆動制御装置(ユニット)の開発を目指しています.また,長期間使用によるゴムなどの経年劣化や故障検知の研究にも取り組んでいます.そして,使いやすいパワーアシスト装置やリハビリ機器の発展に繋がることを期待しています.
本研究に関する発表論文:
-
T. Itto and K. Kogiso: Hybrid modeling of McKibben pneumatic artificial muslce systmes, IEEE Joint International Conference on Industrial Technology & IEEE Southeastern Symposium on System Theory, pp. 57-62, 2011. [ieeexplore]
-
K. Kogiso, K. Sawano, T. Itto, and K. Sugimoto: Identification procedure for McKibben pneumatic artificial muscle systems, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3714-3721, 2012. [ieeexplore]
-
K. Kogiso, R. Naito, and K. Sugimoto: Application of game-theroetic learning to gray-box modeling of McKibben pneumatic artificial muslce systems, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3714-3721, 2013. [ieeexplore]
-
K. Kogiso, R. Naito, and K. Sugimoto: Gray-box identification of McKibben pneumatic arfiticial muscle using interpolation of load-dependent paramters, IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp.1228-1234, 2013. [ieeexplore]
-
K. Urabe and K. Kogiso: Application of hybrid model predictive control to McKibben pneumatic artificial muscle system, SICE International Symposium on Control Systems, 514-5, 2015.
-
内藤,小木曽:ゲーム理論的学習によるMcKibben型空気圧ゴム人工筋のパラメータ推定,計測自動制御学会論文集,Vol. 50, No. 5, pp. 411-417, 2014.
[14sice_PAMGT.pdf] -
K. Urabe and K. Kogiso: Hybrid nonlinear model of McKibben pneumatic artificial muscle systems incorporating a pressure-dependent Coulomb friction coefficient, IEEE Multi-conference on Systems and Control, pp. 1571-1578, 2015. [ieeexplore]
-
R. Kadoya and K. Kogiso: Invariant-length PAM model considering virtual weight and PI compensation, SICE International Symposium on Control Systems, 4A2-1, 2016.
-
浦邉,内藤,小木曽:McKibben型空気圧ゴム人工筋モデルの妥当性,計測自動制御学会論文集,Vol. 51, No. 4, pp. 267-273, 2015.
[15pamvalid.pdf] -
T. Kodama, A. Okabe, and K. Kogiso: Simultaneous estimation of contraction ratio and parameter of McKibben pneumatic artificial muscle model using log-normalized unscented Kalman filter, IEEE International Conference on Cyber-Physical Systems, Networks, and Applications, pp. 44-48, 2016. [ieeexplore]
-
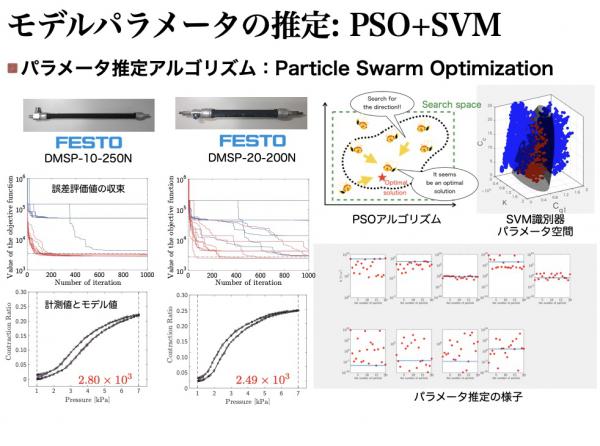
A. Okabe and K. Kogiso: Application of particle swarm optimization to parameter estimation of McKibben pneumatic artificial muscle model, IEEE International Conference on Cyber-Physical Systems, Networks, and Applications, pp. 49-54, 2016. [ieeexplore]
-
A. Okabe, T. Ishikawa, K. Kogiso, and Y. Nishiyama: Efficient PSO-based algorithm for parameter estimation of McKibben PAM model, IEEE Conference on Control Technology and Applications, pp. 1414-1419, 2017. [ieeexplore]
-
T. Ishikawa, Y. Nishiyama, and K. Kogiso: Parameter extraction for identifying product type of McKibben pneumatic artificial muscles, IEEE Conference on Control Technology and Applications, pp. 1935-1940, 2017. [ieeexplore]
-
T. Kodama and K. Kogiso: Applications of UKF and EnKF to estimation of contraction ratio of McKibben pneumatic artificial muscles, American Control Conference, pp. 5217-5222, 2017. [ieeexplore]
-
横山,小木曽:収縮率推定によるMcKibben型空気圧ゴム人工筋の位置決め制御実験,計測自動制御学会論文集,Vol. 53, No. 11, pp. 567-573, 2017.[download]
-
T. Ishikawa, Y. Nishiyama, and K. Kogiso: Characteristic extraction for model parameters of McKibben pneumatic artificial muscles, SICE Journal of Control, Measurement, and System Integration, Vol. 11, No. 4, pp. 357-364, 2018. [doi]
-
K. Yokoyama and K. Kogiso: PID position control of McKibben pneumatic artificial muscle using only pressure feedback, American Control Conference, pp. 3362-3367, 2018. [ieeexplore]
-
T. Ishikawa, K. Kogiso, and K. Hamamoto: Fault analysis of aging McKibben pneumatic artificial muscle in terms of its model parameters, IEEE Conference on Control Technology and Applications, pp. 398-403, 2018. [ieeexplore]
-
A. Okabe and K. Kogiso: Efficient algorithm for constructing a load-dependent McKibben pneumatic artificial muscle model, IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 962-967, 2018. [ieeexplore]
-
T. Shin and K. Kogiso: Sensorless angle and stiffness control of antagonistic PAM actuator using reference set, Advanced Robotics, Volume 36, Issue 9, pp. 423-437, 2022. [AR]
-
T. Shin, K. Teranishi, and K. Kogiso: Cyber-secure pneumatic actuator system equipped with encrypted controller and attack detectors, Advanced Robotics, Volume 36, Issue 9, pp. 438-449, 2022. [AR]
-
T. Shin, T. Ibayashi, and K. Kogiso, Detailed dynamic model of antagonistic PAM system and its experimental validation: Sensor-less angle and torque control with UKF, IEEE/ASME Transactions on Mechatronics, Volume 27, Issue 3, pp. 1715-1726, 2022. [ieeexplore]
解説記事:
- 小木曽:McKibben型空気圧ゴム人工筋のモデル化とパラメータ推定,特集号 人に寄り添う空気圧システムの現状と展望,計測と制御,Vol. 56, No. 4, pp. 253-257, 2017.
[17_SICE_PAMmodel.pdf] -
新,小木曽:リハビリテーション医療を加速するソフトアクチュエータとセキュアな制御技術,Medical Science Digest,株式会社ニューサイエンス社,Vol. 47, No. 5, pp. 162-163, 2021.
書籍:
- 小木曽:McKibben型空気圧ゴム人工筋肉の数理モデルとその特徴,監修 暦本純一,オーグメンテッド・ヒューマン:AI と人体科学の融合による人機一体,究極のIFが創る未来,第2編第1章第2項2-4 分担執筆, pp.105-114, エヌ・ティー・エス,2018.
謝辞
本研究は,第25回マツダ研究助成 09KK-296 (2009),JSPS 科学研究費 若手研究A 25709014 (2013-2015) ,および,科学研究費 基盤研究C 18K04012 (2018-2020) の助成を受けました.



